1. CAN协议
- 和串口、I2C、SPI、485、232等通讯协议一样,CAN也是种传送数据的方式。
1.1 物理接线
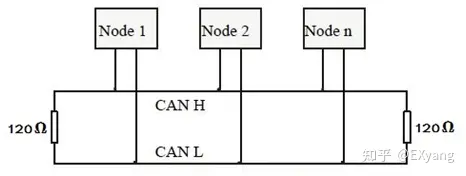
- CAN通信需要两根线,
CAN_H、CAN_L,两根线采用双绞线的方式缠绕。 - 每个通讯节点的
CAN_H接在一起,CAN_L接在一起。 - 两端接两个120欧的电阻。
1.2 信号传输
- 线上的电位采用差分信号进行判别,抗干扰能力强。
- 电平判断
- CAN_H - CAN_L < 0.5V 时候为隐性的,逻辑信号表现为”逻辑1”- 高电平。
- CAN_H - CAN_L > 0.9V 时候为显性的,逻辑信号表现为”逻辑0”- 低电平。
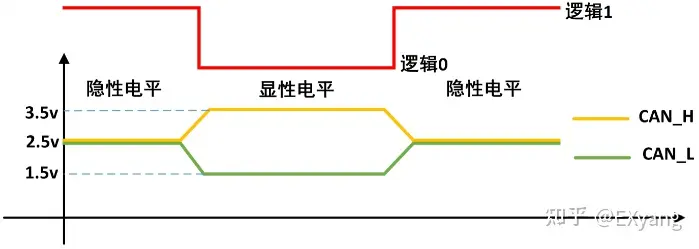
CAN总线在电平传输上,具有仲裁判断逻辑,优先级为:显性(低电平)>隐形(高电平)!
1.3 协议规定
CAN规定了5种不同的数据帧(发送一次数据就是一帧数据,类似于串口发送一个字节数据?)。
- 数据帧(重要):向接受单元传送数据用的。
- 遥控帧:向远端节点请求数据用的。
- 错误帧:当检测出错误是向其他单元通知错误。
- 过载帧:接收单元通知其未做好准备。
- 帧间隔:用于将数据帧和遥控真与前面的分离开。
主要掌握数据帧,遥控帧基本上已经不用了。其他的先知道即可。
对于数据帧和遥控帧,帧结构都由以下7个段组成。

该结构有两种格式:标准格式和扩展格式。可以看出,两种格式的区别仅在于仲裁段和控制段不同。
每个段都有自己的格式,用户需要关注的段为:仲裁段、数据段。更具体的说是,仲裁段的 ID和数据段。
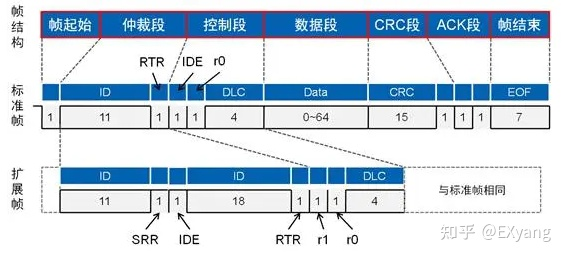
仲裁段有一套仲裁机制,当总线上的各个节点同时发送设备时,根据ID优先级判断哪个节点的信息有效。ID 越小,优先级越高。
更具体的仲裁机制还需要根据不同的段做出不同的反应,比如退出竞争、产生错误等。这里就不详细说了,有兴趣的可以再去详细了解。
数据段中是每次要发送的数据,其长度为 0-8 个字节。
作为写应用的,我们只需要关注这两部分即可。
比如 RT-Thread 中的 CAN 发送函数(来源)。需要我们注意的有ID、格式、帧类型、数据、长度。
1 | struct rt_can_msg msg = {0}; |
而相关的内容,API 都已经封装好了,就不用我们管了。
1 | struct rt_can_msg |
接收也是一样的封装好了,我们只需要取出我们需要的 ID 和数据即可。
1 | /* 从 CAN 读取一帧数据 */ |
至此,CAN 的使用需要了解的应该就够了。
如果想了解的更详细,别人的文章,上面有水印的图就是他的。知乎文章
2. CANopen概念
从上面可以看出,CAN 总线确定了一种数据传输的物理和数据方式。即,用什么设备传输数据、怎么传输数据、格式是什么。
但是,在我们写应用的时候,数据传输时每个人对于 ID 或者数据都有自己的规定,不统一。即,在这个层面上缺乏一个统一的标准去规定不同ID和数据的含义是什么。
因此,CANopen做的就是这个工作。
2.1 通信特点
CANopen规定的报文特点:
- 报文传输采用 CAN 标准帧格式。即 11bit 的 ID 域,以尽量减小传输时间;
- 网络控制报文均采用数据最小字节数。比如心跳报文,只有1个字节数据;
- 实时更新的过程数据无需接收方报文应答。即采用生产消费模型,降低总线负载;
- 需要接收方确认的配置参数一般都是采用快速单字传输。即1个报文最多传送1个32字节的参数变量,避免了分帧引起的实时性降低。
规定上述特点的原因是,CAN通信具有可以突发发送的实时性优势,但是多个节点下,突发具有较大的冲突可能性。因此,上述特点可以尽可能保证实时性。
CANopen 协议通常分为用户应用层、对象字典以及通信三个部分。
- 用户应用层:用户根据实际的需求编写的应用对象。
- 对象字典:最核心的部分,描述了应用对象和 CANopen 报文之间的关系。
- 通信:很重要的部分,定义了 CANopen 协议通信规则以及与CAN控制器驱动之间对应关系,掌握这部分才能让我们写自己的应用对象。
前面我们说了,CAN通信中,我们需要关注的就是CAN-ID和DATA。
在CANopen中也是一样的,我们需要知道这两部分是怎么设置的,分别有什么含义。
2.2 对象字典(OD)
CANopen 对象字典(OD: Object Dictionary)是 CANopen 协议最为核心的概念。
对象字典就是一个有序的对象组,描述了对应 CANopen 节点的所有参数,包括通讯数据的存放位置也列入其索引,这个表变成可以传递形式就叫做EDS文件(电子数据文档 Electronic Data Sheet)。
其中,每个对象采用一个 16 位的索引值来寻址,这个索引值通常被称为索引,其范围在0x0000到0xFFFF之间。为了避免数据大量时无索引可分配,所以在某些索引下也定义了一个8 位的索引值,这个索引值通常被称为子索引,其范围是0x00到0xFF之间。每个索引内具体的参数,最大用32位的变量来表示,四个字节。
如下图是某遵循 CANopen 协议的电机的 EDS 文件。
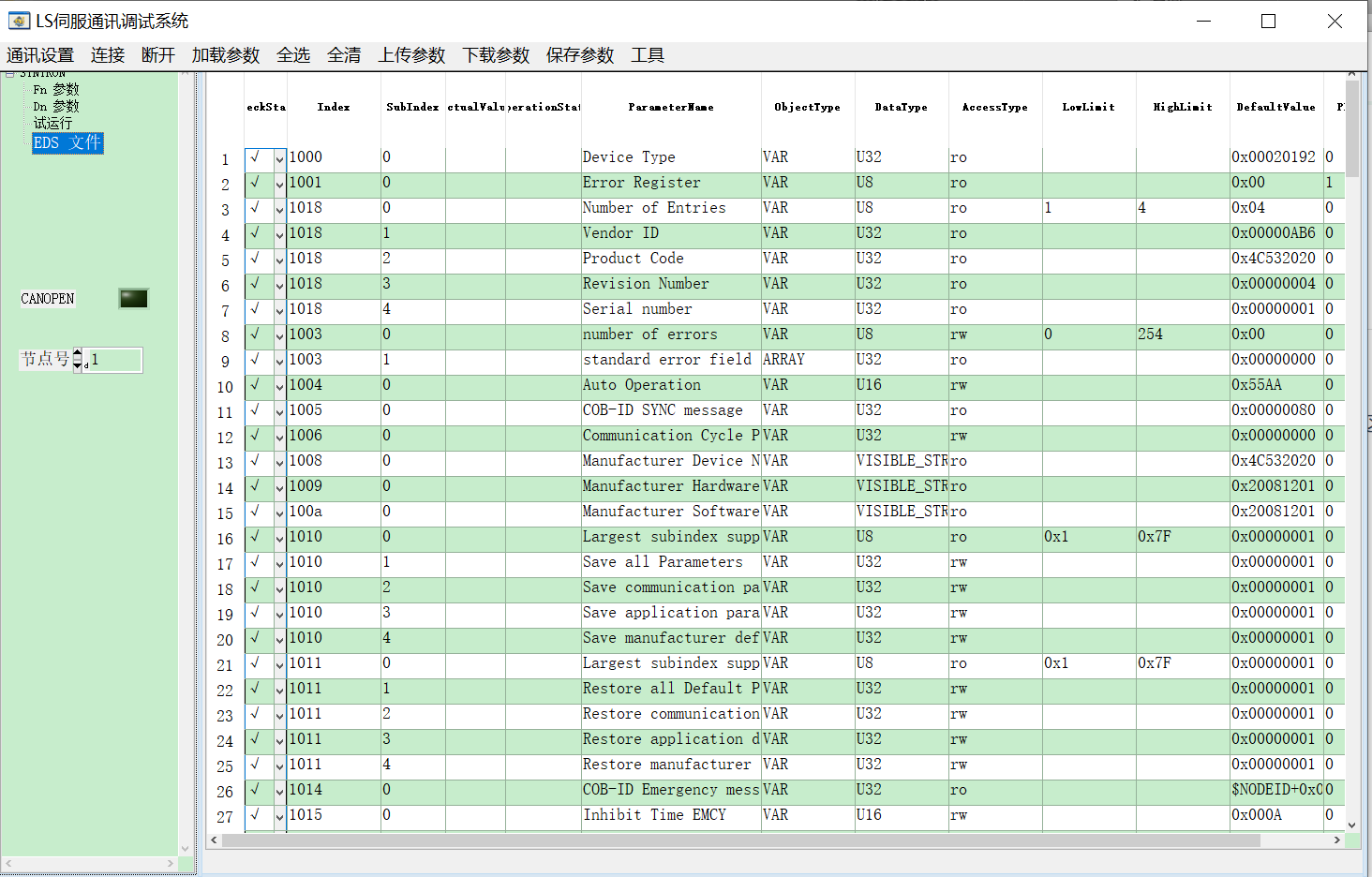
EDS 文件是每个节点都有的,采用字典的形式保存了该节点的参数等信息。其他节点可以通过索引等信息访问或者修改这些信息。
理解:
对于某个设备而言,预定义了各个节点通信需要收发的信息都有什么,表现形式上就是如上图的一个表格。每一行就是一个对象,每个对象中存放的是什么内容可以自定(有些条目是固定的)。CANopen的收发就是在收发这些对象。
2.3 数据传输(PDO、SDO)
2.3.1 对象分类
说数据传输之前先说两种数据收发模型:
- 生产消费模型:生产者向外发送数据,不指定对象,消费者消费数据。即,==生产者并不会得到回复==。
- 服务器客户端模型:客户端向服务器发送数据请求,服务器回复请求的数据。即,==客户端会得到数据回复==。其中,从服务器读取的动作是上传,向服务器写入的动作是下载(可以看出该动作是相对于服务器而言的)。
在 CANopen 中配置信息或应用信息的传输是通过两种对象进行传输的:过程数据对象 PDO(Process data object)、服务数据对象 SDO(Service data object),其中:
- PDO:属于过程数据,即单向传输,无需接收节点回应 CAN 报文来确认,即,生产消费模型。
- SDO:属于服务数据,有指定被接收节点的地址(Node-ID),并且需要指定的接收节点回应 CAN 报文来确认已经接,如果超时没有确认,则发送节点将会重新发送原报文。即服务器客户端模型。
即,把上面的那些对象分为两类,PDO、SDO,第一类表示发过去无需回复。第二类表示发送过去之后需要接收方进行回复的对象。
对于 PDO 对象:由于需要区分每个 CANopen 节点的输入和输出,所以 PDO 分为 TPDO(发送PDO)和 RPDO(接收PDO),发送和接收是以 CANopen 从站节点为参考(如果CAN主站就相反)。TPDO 和 RPDO 分别有4个数据对象,每种数据对象就是1条CAN报文封装,这些都是数据收发的容器。
- TPDO1(发送PDO):从站主动传输TXPDO数据给主站,从站发送。
- RPDO1(接收PDO):主站主动传输RxPDO数据给从站,从站接收。
- TPDO2
- RPDO2
- TPDO3
- RPDO3
- TPDO4
- RPDO5
可以看到这个RT是站在从站的角度看的。
另外,不同类别对象的索引,是有规定的,不是随便定的。
2.3.2 对象编号
CANopen 预定义了强制性的缺省标识符(CAN-ID)分配表,该分配表是基于11 位CAN-ID 的标准帧格式。将其划分为4 位的功能码(Function-ID)和7 位的节点号(Node-ID)。
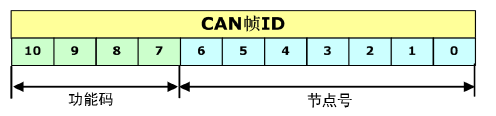
从这张图中,要搞清楚一个概念。
节点号:一个网络中的每个节点都有一个自己的编号,用 7bit 表示,即,一个网络中最多能有127个通讯节点(0不行)。
通信对象编号(COB-ID):在 CANopen 中就是 CAN-ID,可以看出,节点号被包含在 COB-ID 中。
3. 数据通信
前面提到,不管是CAN还是CANopen需要我们关注的都是CAN-ID和DATA。
3.1 服务数据对象SDO
特性:SDO 主要用于 CANopen 主站对从节点的参数配置。服务确认是SDO的最大的特点,为每个消息都生成一个应答,确保数据传输的准确性。
在收发 SDO 对象时比较简单固定。一般在 CANopen 网络中,只有 NMT 主机能发起 SDO 通讯,进行节点参数配置或者关键性参数的传递。当然从节点也可以对其他从节点发起SDO通讯。
NMT主机后面会介绍,这里只需要知道,主机(主动方)可以发起SDO通讯就行了。
3.1.1 ID设置
发送方(客户端):发送 CAN-ID 为
600h + Node-ID的报文,其中 Node-ID 为接收方(服务器)的节点地址,数据长度均为8字节;接收方(服务器):成功接收后,回应 CAN-ID 为
580h + Node-ID的报文。这里的 Node-ID 也是是接收方(刚刚的发送方)的节点地址,数据长度均为8字节。
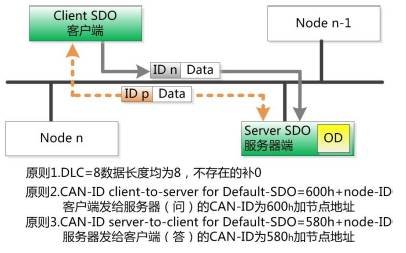
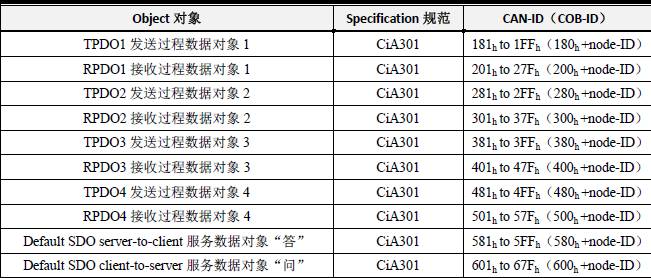
如下图中的最后两行,为 CANopen 预定义报文的 SDO 报文中的 ID 分类。
3.1.2 数据设置
在发送数据时分为两类,快速SDO协议、普通SDO协议。
快速SDO协议(常用)
最常用最常见的 SDO 协议是快速 SDO,快速,就是1次来回就搞定。前提是读取和写入的值不能大于 32 位。如图所示,为快速 SDO 协议的示意图。命令中直接包含了要读写的索引、子索引、数据。可谓直接命中。
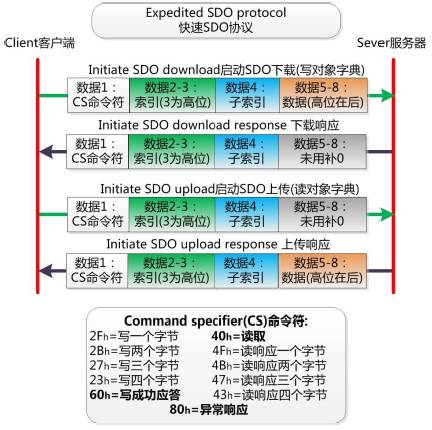
通过快速 SDO,可以直接对 CANopen 节点的对象字典中的值进行读取和修改,所以在做参数配置之外,也经常作为关键性数据传输之用。比如 CANopen 控制机器人的电机转动角度时,就使用 SDO 来传输,保证可靠。
举个例子,保利时电机将电机设置为转矩模式。
需要发送的数据为:
- ID:
0x00 00 06 02,其中0x2是要发送给(接收方)的节点号。(可以对照3.1.1小节的图) - DATA:
0x2F 60 60 00 04 00 00 00,其中0x2F为命令符,0x60 60为索引,0x00为子索引,0x04 00 00 00为要发送的数据。
接收到的回复为:
- ID:
0x00 00 05 82,其中0x2表示是谁给出的回复。(参考2.3小节最后) - DATA:
0x60 60 60 00 00 00 00 00,其中0x60表示成功,0x60 60为索引,0x00为子索引,0x00 00 00 00为回复的数据。
这就是一个发送SDO对象的案例。这里更改的对象为:索引为0x60 60,子索引为0x00,对象含义为电机的运行模式。
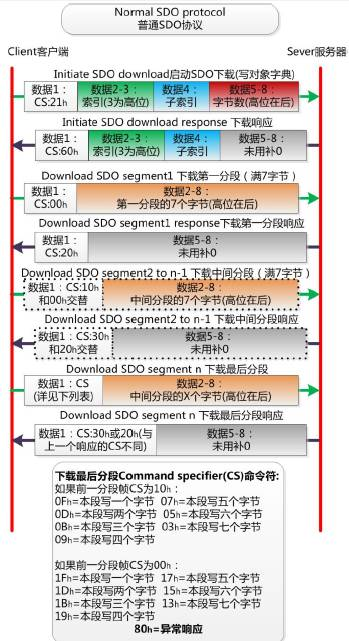
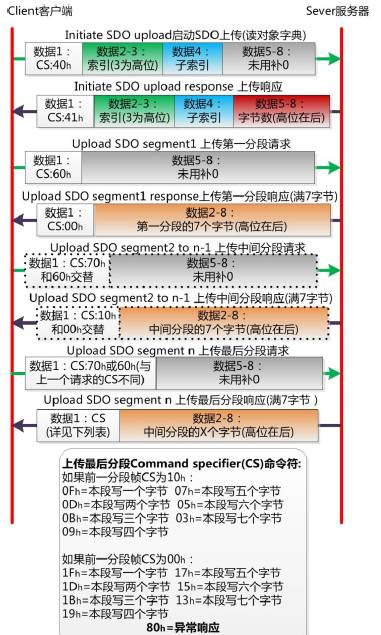
普通SDO协议(了解)
当需要传输的值超过 32 位时,就不能使用快速 SDO 传输。必须使用普通 SDO 进行分帧传输。在应用中较少用到。
普通 SDO 协议难点在于分包逻辑与 CS 命令符的变化。依然难以记忆。
当然普通 SDO 的 CAN 帧 ID 与快速 SDO 相同,依然发送方(客户端)发送的报文CAN-ID为600h + Node-ID,接收方(服务器)成功接收后,回应CAN-ID为580h + Node-ID的报文。
下载协议download protocol
上传协议upload protocol
3.2 过程数据对象PDO
PDO 属于过程数据,用来传输实时数据,即单向传输,无需接收节点回应 CAN 报文来确认,属于“生产消费”模型 PDO。数据长度被限制为1~8 字节。最多只要1帧就可以把一条信息或者一个变量传递结束。
但是PDO的收发不只是简单的设置ID和DATA的问题,这个相对来说有点麻烦。
3.2.1 ID设置
- 发送方:根据自己属于哪一类对象 PDO 对象决定自己的 ID。比如,发送 CAN-ID 为
180h + Node-ID的报文,其中 Node-ID 为发送方(自己)的节点地址,用于告诉是谁发送出去的。数据长度 1 - 8 字节。
如下图中的前面 8 行,为 CANopen 预定义报文的 PDO 报文中的 ID 分类。
当然,如果某个节点需要传递的资源特别多,则有出现例如 TPDO5 之类的数据对象,而它们的 CAN-ID 定义就需要打破预定义的规则,比如我们可以定义Node-ID为1的节点中 TPDO5 是 182h,这里的 PDO 的 COB-ID 中的低 7 位不再是表示 Node-ID。其实所有的 PDO 的 COB-ID 与 Node-ID 无必然规则上的联系。
也举个例子,保利时电机驱动器接通后,会一直循环上报编码器位置。
上位机接收到的数据为:
- ID:
0x01 82,其中0x2是驱动器自己的节点号。(0x01 80 可以对照到上图中的TPDO1)。 - DATA:
0x2F 60 60 00,为编码器的读数。
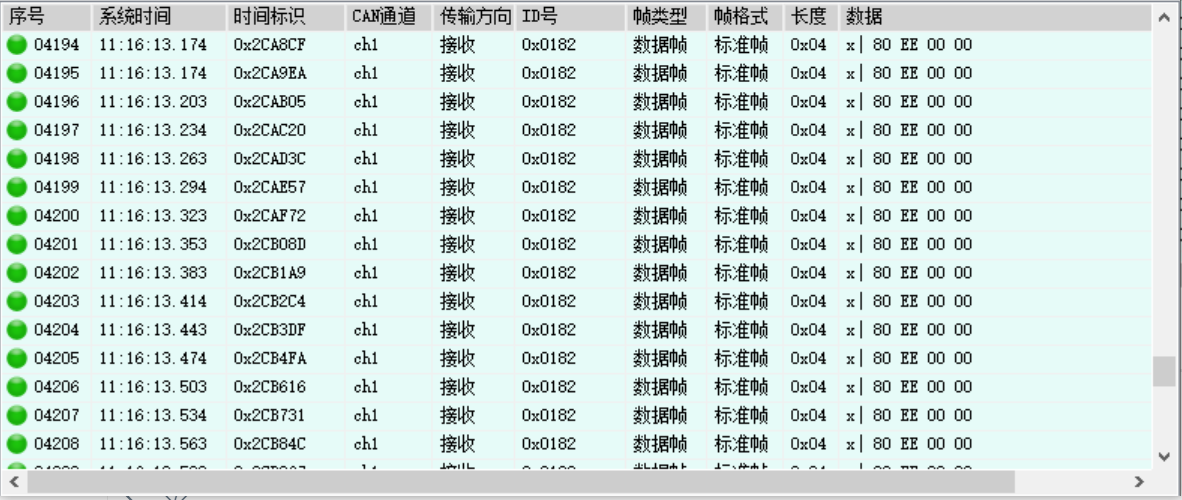
这就是一个上位机接收PDO对象的案例。这里主要是为了看这个ID,数据先不用在意,等会看后面。
3.2.2 传输方式
PDO的两种传输方式:同步传输和异步传输。如图所示,1、2为异步传输,3、4为同步传输。
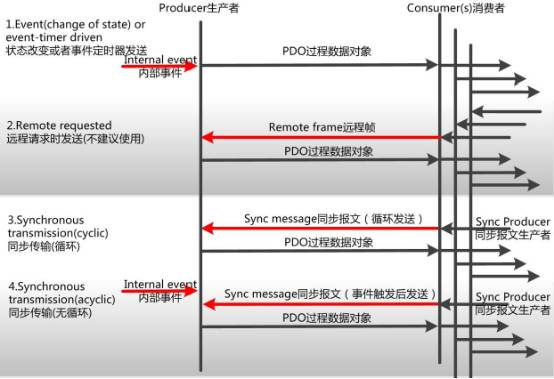
上面的例子中,就是用的第一种异步传输的方式。
3.2.3 数据设置
PDO 的通信数据中,定义了该设备所使用的 COB-ID、传输类型、定时周期等。
其中,RPDO通讯参数位于对象字典索引的 1400h to 15FFh,TPDO通讯参数位于对象字典索引的 1800h to 19FFh。
前面说过,不同类别对象的索引,是有规定的,不是随便定的。这里就看到了。
每条索引代表一个PDO的通信参数集,其中的子索引分别指向具体的各种参数。如表所示。
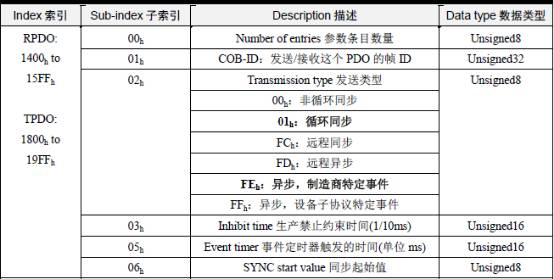
- Number of entries 参数条目数量:即本索引中有几条参数;
- COB-ID:即这个PDO发出或者接收的对应CAN帧ID;
- 发送类型:即这个PDO发送或者接收的传输形式,通常使用循环同步和异步 制造商特定事件较多;
- Inhibit time生产禁止约束时间(1/10ms):约束PDO发送的最小间隔,避免导致总线负载剧烈增加,比如数字量输入过快,导致状态改变发送的TPDO频繁发送,总线负载加大,所以需要一个约束时间来进行“滤波”,这个时间单位为0.1ms;
- Event timer事件定时器触发的时间(单位ms):定时发送的PDO,它的定时时间,如果这个时间为0,则这个PDO为事件改变发送。
- SYNC start value同步起始值:同步传输的PDO,收到诺干个同步包后,才进行发送,这个同步起始值就是同步包数量。比如设置为2,即收到2个同步包后才进行发送。
3.2.4 PDO映射参数(难)
PDO 对象并不是和 SDO 一样直接看着表使用ID + DATA发送出去的。
PDO 所携带的实时数据类型和内容是由设备对象字典中所规定的该 PDO 映射结构决定。
PDO映射参数,包含了一个对象字典中的对象列表,这些对象映射到相应的PDO,其中包括数据的长度(单位,位),对于生产者和消费者都必须要知道这个映射参数,才能够正确的解释PDO内容。就是将通信参数、应用数据和具体CAN报文中数据联系起来。
- RPDO 通讯参数 1400h to 15FFh,映射参数 1600h to 17FFh,数据存放为 2000h 之后厂商自定义区域;
- TPDO 通讯参数 1800h to 19FFh,映射参数 1A00h to 1BFFh,数据存放为 2000h 之后厂商自定义区域。
有点懵逼哈,整个例子,看下图。

解释一下这张图:
- 第一个表:从 Index 索引可以看出这是个 TPDO 对象。子索引和对应的对象内容,定义了该对象的ID、发送类型等。
- 第二个表:从 Index 索引可以看出,这是上面那个 TPDO 对象的映射对象。
- 子索引 01h 的内容为 0x2000 01 08,表示索引为 0x1800 的 TPDO 对象的前 8 位值为:索引为2000h、子索引为 0x01 的对象的值。
- 子索引 02h 的内容为 0x2003 03 10,表示索引为 0x1800 的 TPDO 对象的接着 16 位值为:索引为2003h、子索引为 0x03 的对象的值。(注意,低位在前)
- 子索引 03h 的内容为 0x2003 01 08,表示索引为 0x1800 的 TPDO 对象的接着 8 位值为:索引为2003h、子索引为 0x01 的对象的值。
- 第三个表,从 Index 可以看出,这里是厂商自定义区域。
- 第四个表,我们实际发送的内容
- ID:0x181。(从第一个表看)
- DATA:就是按照上面映射得到的值。
另外,前面说对象的索引不是能随便定义的。
- 分配对象:索引为0x1cxx
- 映射对象:索引为0x16xx、0x1Axx
- 应用对象:索引为0x6xxx、0x7xxx
比如,3.1小节的案例中,发送的对象的索引为0x6060,就是一个应用对象。这里的映射对象的索引也是确定的。
3.2.5 设置步骤
PDO报文用来传输有实时性要求的过程数据,传输类型可以是事件类型、同步传输、周期传输。PDO报文基于生产者消费者模式,所以使用之前需要先配置好生产者和消费者,这些在映射参数(1600h+n)和通信参数(1400h+n)里面完成。具体分以下三步完成。注:n 为设备地址。
接收型 RPDO
在索引
1400h + n,子索引 01 确定的变量里写入COB-ID(4字节)在索引
1400h + n,子索引 02 里面写入传输类型t(1字节)t = 1–240,表示设备每收到 t 个同步报文发送一次 PDO;t = 253,表示每收到一个远程(RTR = 1)PDO 请求后方可发送;t = 254,表示事件触发传输模式(制造商特定事件);t = 255,事件触发传输模式(设备子协议CiA 401特定事件),即利用设备自身内部的定时器,定时发送一条 PDO 报文。在索引
1600h + n下面定义映射关系,子索引 00:定义其后面的总子索引数目,在该例子中为2;在索引
1600h + n下面定义映射关系,子索引 01:写入第一个变量的映射地址,按以下格式写:索引(2字节)- 子索引(1字节)- 数据类型(1字节)。例如将1号通道的模拟量值定义为映射变量,它的索引为6401h,子索引为01,数据类型为2字节16位,代号为10h,连起来即64010110h;
在索引
1600h + n下面定义映射关系,子索引 02:这里定义 1-8 通道的数字量输入(索引6000h:01)为映射变量,故其内容为60000108h。至此已完成配置。
发送型 PDO
- 在索引
1800h + n,子索引 01 写入 COB-ID; - 在其对应子索引 02 写入传输类型,同 RPDO;
- 在索引
1A00h + n配置映射,具体同 RPDO。
4. 补充
这也是很关键的部分,但是为了防止影响理解上面的PDO、SDO,后说这部分。
4.1 NMT网络管理
在 CAN 通讯中,所有节点通信地位平等,运行时允许自行发送报文。
但,CANopen 网络为了稳定可靠可控。在一个通讯网络中需要设置:
- 一个网络管理主机NMT-Master(Network Management-Master)。一般是 CANopen 网络中具备监控的 PLC 或者 PC。也称为 CANopen 主站。
- 剩下的一个或多个为从机NMT-slaves。
NMT主机和NMT从机之间通讯的报文就称为NMT网络管理报文。管理报文负责层管理、网络管理和ID分配服务。例如,初始化、配置和网络管理(其中包括节点保护)。
另外,为了协调各个节点的同步、心跳、时间、错误提示等通讯控制,CANopen还定义了一系列特殊协议(Special protocols)报文。

上图中,绿色底纹的常用。
每个CANopen从节点的 CANopen 协议栈中,必须具备 NMT 管理的相应代码。这是节点具备 CANopen 协议的最基本的要素。
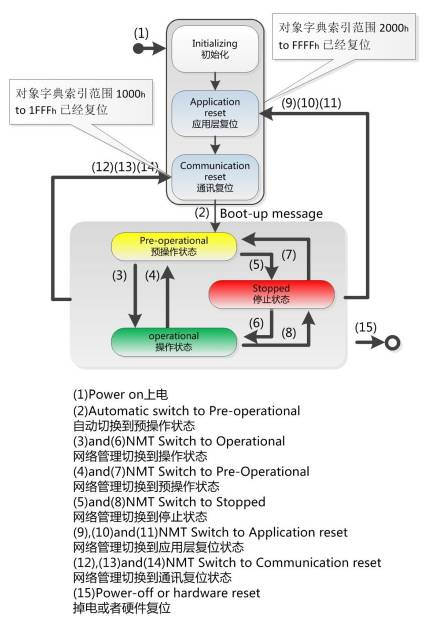
4.2 NMT节点状态
NMT管理涉及到一个CANopen节点从上电开始的6钟状态,包括:
- 初始化(Initializing):节点上电后对功能部件包括 CAN 控制器进行初始化;
- 应用层复位(Application Reset):节点中的应用程序复位(开始),比如开关量输出模拟量输出模拟量输出的初始值;
- 通讯复位(Communication reset):节点的 CANopen 通讯复位(开始),从这个时刻,此节点就可以进行 CANopen 通讯了;
- 预操作状态(Pre-operational):节点的 CANopen 通讯处于操作就绪状态,此时此节点不能进行 PDO 通信,而可以进行 SDO 进行参数配置和 NMT 网络管理的操作;
- 操作状态(operational):节点收到 NMT 主机发来的启动命令后,CANopen 通讯被激活,PDO 通信启动后,按照对象字典里面规定的规则进行传输,同样 SDO 也可以对节点进行数据传输和参数修改;
- 停止状态(Stopped):节点收到 NMT 主机发来的停止命令后,节点的 PDO 通信被停止,但 SDO 和 NMT 网络管理依然可以对节点进行操作;
除了初始化状态,NMT 主机通过 NMT 命令可以让网络中任意一个的 CANopen 节点进行其他5种状态的切换。当然 CANopen 节点也可以程序自动完成这些状态的切换。
4.3 NMT节点报文
- 节点上线报文:任何一个 CANopen 从站上线后,为了提示主站它已经加入网络(便于热插拔),或者避免与其他从站 Node-ID 冲突。这个从站必须发出节点上线报文(boot-up),节点上线报文的ID为 700h + Node-ID,数据为1个字节0。生产者为 CANopen 从站。
简单来说,一个从节点上线需要先发送个报文,告诉主机我上线了。
- 心跳报文:为了监控 CANopen 节点是否在线与目前的节点状态。从站需要定时发送状态报文(心跳报文)。ID与节点上线报文相同为700h + Node-ID,数据为1个字节,代表节点目前的状态,04h为停止状态,05h为操作状态,7Fh为预操作状。
CANopen 从站按其对象字典中 1017h 中填写的心跳生产时间(ms)进行心跳报文的发送,而 CANopen 主站(NMT主站)则会按其 1016h 中填写的心跳消费时间进行检查,假设超过诺干次心跳消费时间没有收到从站的心跳报文,则认为从站已经离线或者损坏。
节点守护:在早期 CANopen 应用中,可以通过轮询模式监视从站状态的节点守护模式,它与心跳报文模式二者不能并存。通过节点守护,MNT主机可以检查每个节点的当前状态。很少用了。
NMT节点状态切换命令:NMT网络管理中,最核心的就是NMT节点状态切换命令,这是NMT主站所进行网络管理的“命令”报文。
- CAN-ID 均为 000h,具备最高的 CAN 优先级。数据为2个字节:
- 第1个字节代表命令类型:
- 01h 为启动命令(让节点进入操作状态);
- 02h 为停止命令(让节点进入停止状态);
- 80h 为进入预操作状态(让节点进入预操作状态);
- 81h 为复位节点应用层(让节点的应用恢复初始状态,比如列车门都恢复打开状态);
- 82h 为复位节点通讯(让节点的 CAN 和 CANopen 通讯重新初始化,一般用于总线收到干扰,导致节点总线错误被动,或者总线关闭时)。
- 第二个字节代表被控制的节点 Node-ID,如果要对整个网络所有节点同时进行控制,则这个数值为0即可。
- 第1个字节代表命令类型:
- CAN-ID 均为 000h,具备最高的 CAN 优先级。数据为2个字节:
另外还有
- 同步协议(Syncprotocol)
- 时间戳协议(Time-stamp protocol):CAN-ID 为 100h,数据长度为 6,数据为当前时刻与1984年1月1日0时的时间差。
- 紧急报文协议(Emergency protocol):其 CAN-ID 存储在 1014h 的索引中,一般会定义为
0x080 + Node-ID,数据包含8个字节。